转载《解剖Go语言map底层实现》
附在文章开头
这篇博客对map底层解释的很详尽,在之前我也只是了解map、字典这类结构底层是散列表,但并不清楚其内部实现的机理,这篇博客算是让我对其底层有更多的了解了。
另外,在Go的使用,或更多的在面试中,经常会被问到的一个问题是,map是否是有序的,若无序,则为什么无序?
首先map数据的存储是无序的,Go map遍历输出是无序的,那么也就是说有一些语言的遍历输出是有序的么?
map其底层为散列表,k-v结构,分布顺序与插入顺序没什么联系,但在实际使用中,散列表在整体插入完成后,其key顺序是固定的,所以在以后的遍历中,访问key的顺序是一致的。
Go官方明确告诉开发者其map结构遍历输出无序,那什么机制导致其无序呢,查询资料后发现,for range map 在开始处理循环逻辑时,Go并不是在固定位置上进行遍历,其是随机的,那也就是其起始位置都不固定,遍历顺序肯定会不固定了。
map是Go语言中基础的数据结构,在日常的使用中经常被用到。但是它底层是如何实现的呢?
map的底层
Golang中map的底层实现是一个散列表,因此实现map的过程实际上就是实现散表的过程。在这个散列表中,主要出现的结构体有两个,一个叫hmap(a header for a go map),一个叫bmap(a bucket for a Go map,通常叫其bucket)。这两种结构的样子分别如下所示:
hmap:

图中有很多字段,但是便于理解map的架构,你只需要关心的只有一个,就是标红的字段:buckets数组。Golang的map中用于存储的结构是bucket数组。而bucket(即bmap)的结构是怎样的呢?
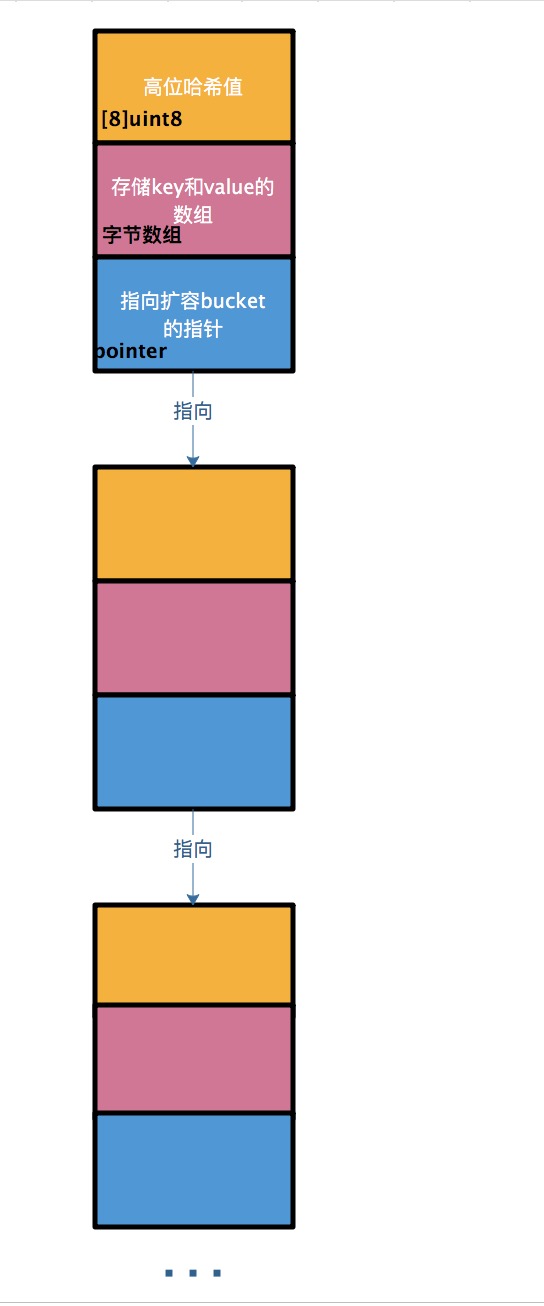
bucket:

相比于hmap,bucket的结构显得简单一些,标红的字段依然是“核心”,我们使用的map中的key和value就存储在这里。“高位哈希值”数组记录的是当前bucket中key相关的“索引”,稍后会详细叙述。还有一个字段是一个指向扩容后的bucket的指针,使得bucket会形成一个链表结构。例如下图:
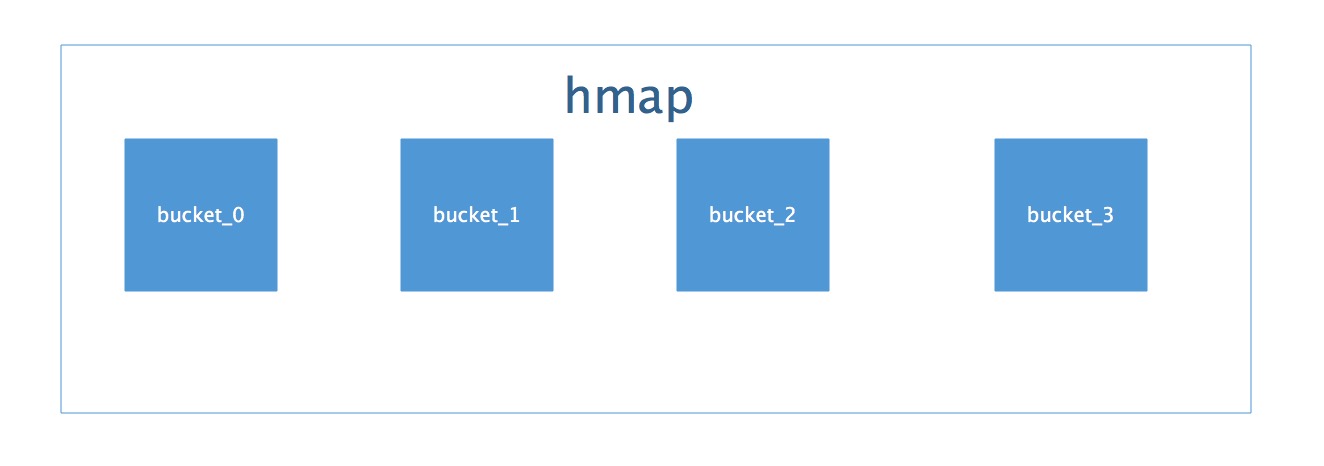
由此看出hmap和bucket的关系是这样的:
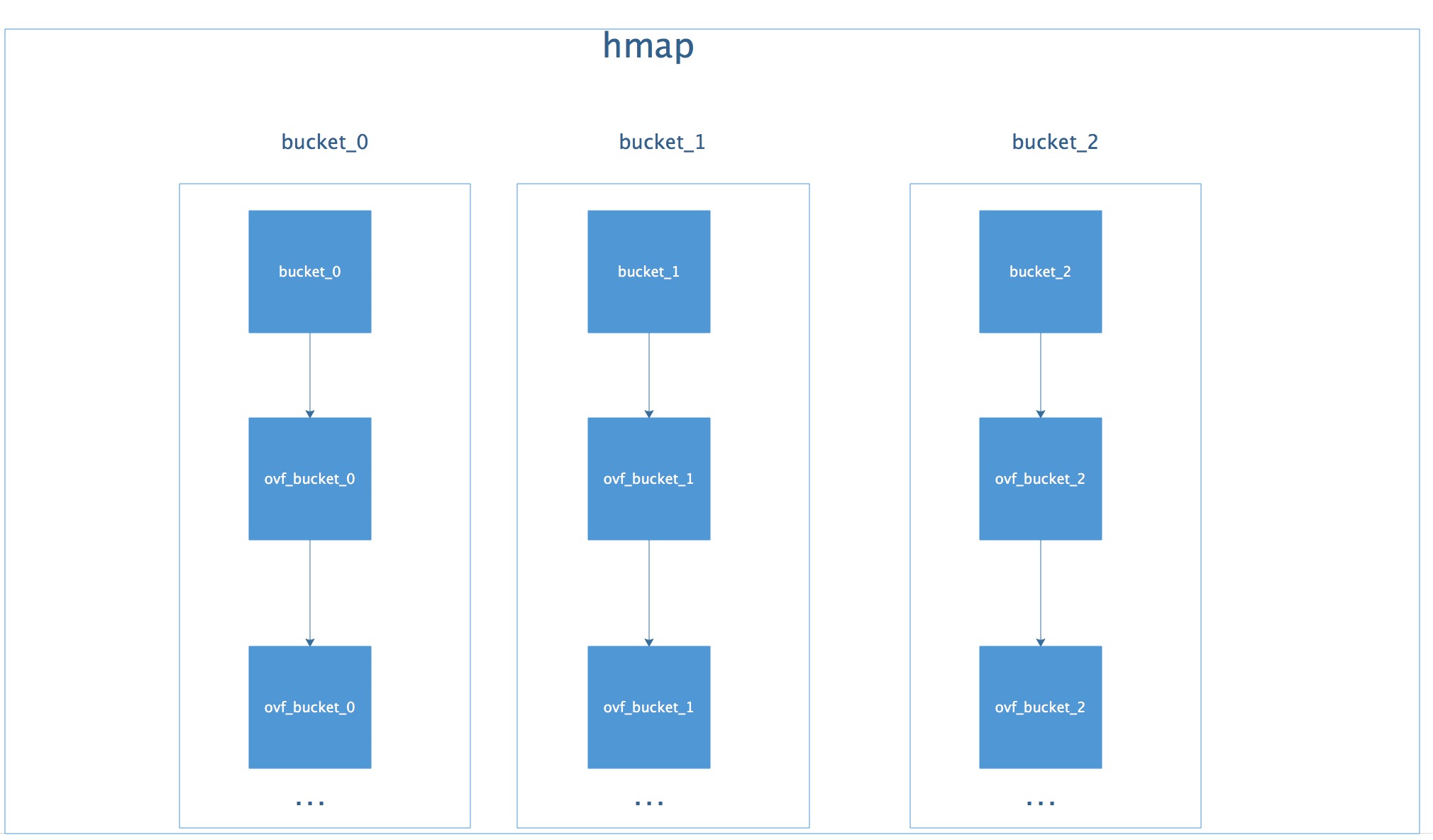
而bucket又是一个链表,所以,整体的结构应该是这样的:
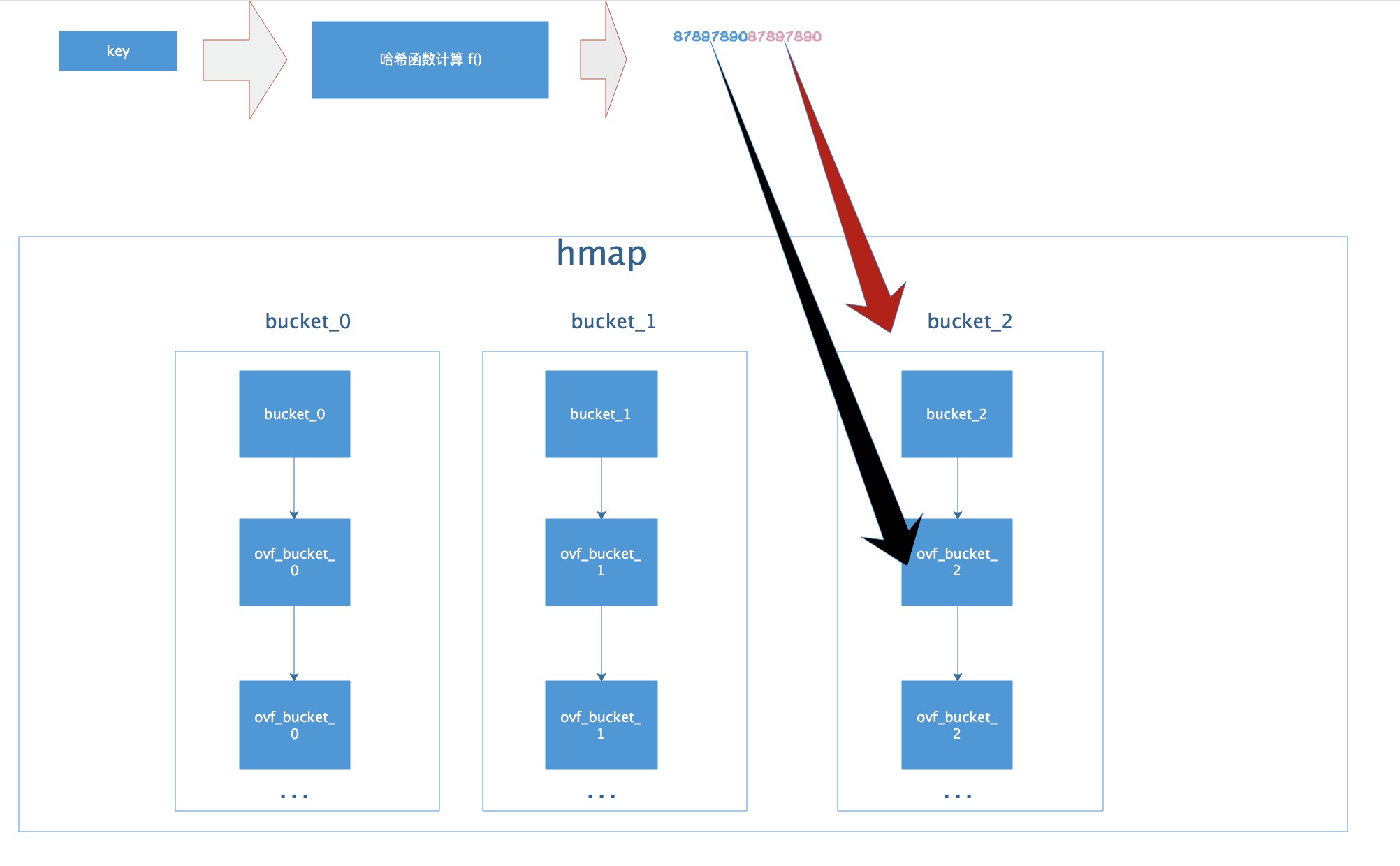
哈希表的特点是会有一个哈希函数,对你传来的key进行哈希运算,得到唯一的值,一般情况下都是一个数值。Golang的map中也有这么一个哈希函数,也会算出唯一的值,对于这个值的使用,Golang也是很有意思。
Golang把求得的值按照用途一分为二:高位和低位。
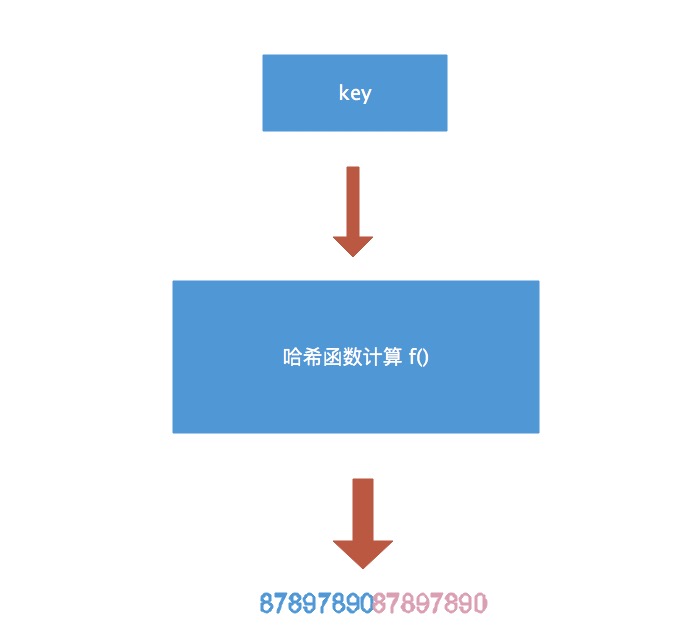
如图所示,蓝色为高位,红色为低位。
然后低位用于寻找当前key属于hmap中的哪个bucket,而高位用于寻找bucket中的哪个key。上文中提到:bucket中有个属性字段是“高位哈希值”数组,这里存的就是蓝色的高位值,用来声明当前bucket中有哪些“key”,便于搜索查找。
需要特别指出的一点是:我们map中的key/value值都是存到同一个数组中的。数组中的顺序是这样的:

并不是key0/value0/key1/value1的形式,这样做的好处是:在key和value的长度不同的时候,可以消除padding带来的空间浪费。
现在,我们可以得到Go语言map的整个的结构图了:
map的扩容
当以上的哈希表增长的时候,Go语言会将bucket数组的数量扩充一倍,产生一个新的bucket数组,并将旧数组的数据迁移至新数组。
加载因子
判断扩充的条件,就是哈希表中的加载因子(即loadFactor)。
加载因子是一个阈值,一般表示为:散列包含的元素数 除以 位置总数。是一种“产生冲突机会”和“空间使用”的平衡与折中:加载因子越小,说明空间空置率高,空间使用率小,但是加载因子越大,说明空间利用率上去了,但是“产生冲突机会”高了。
每种哈希表的都会有一个加载因子,数值超过加载因子就会为哈希表扩容。
Golang的map的加载因子的公式是:
1 | map长度 / 2^B |
阈值是6.5。其中B可以理解为已扩容的次数。
当Go的map长度增长到大于加载因子所需的map长度时,Go语言就会将产生一个新的bucket数组,然后把旧的bucket数组移到一个属性字段oldbucket中。注意:并不是立刻把旧的数组中的元素转义到新的bucket当中,而是,只有当访问到具体的某个bucket的时候,会把bucket中的数据转移到新的bucket中。
如下图所示:当扩容的时候,Go的map结构体中,会保存旧的数据,和新生成的数组
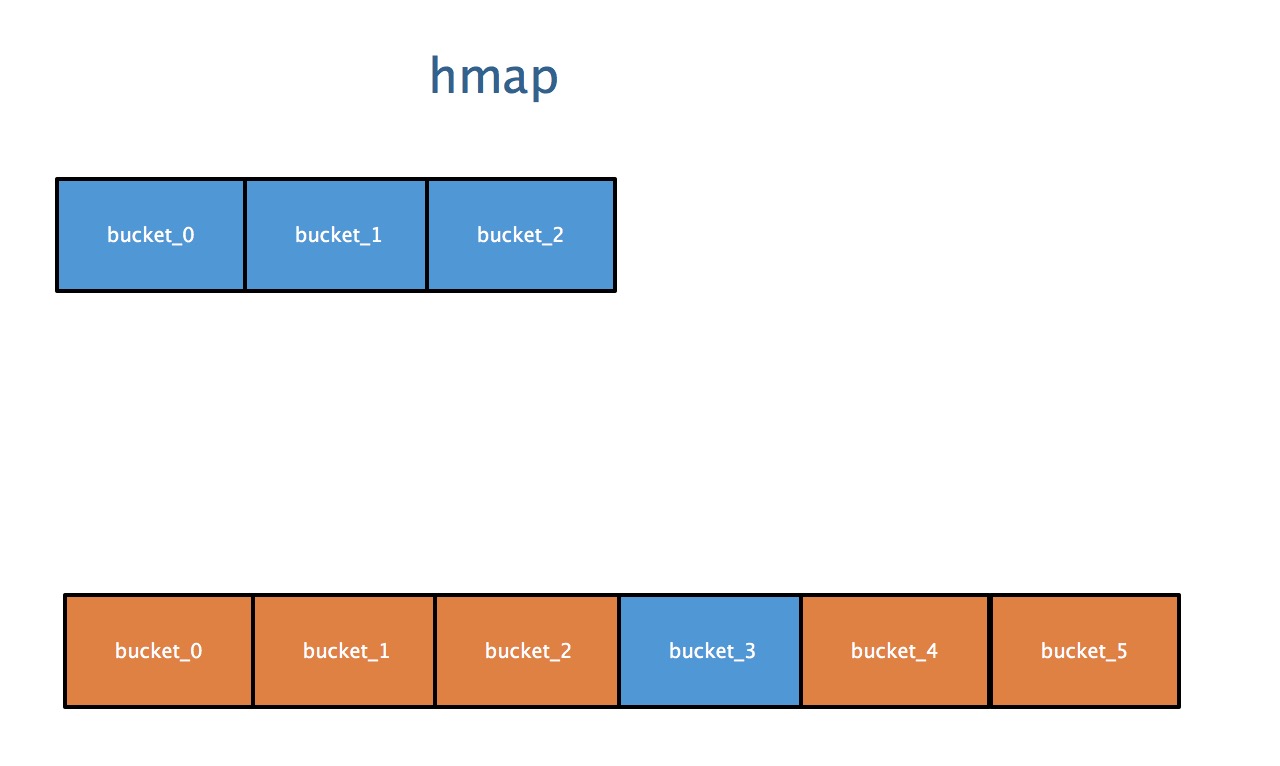
上面部分代表旧的有数据的bucket,下面部分代表新生成的新的bucket。蓝色代表存有数据的bucket,橘黄色代表空的bucket。
扩容时map并不会立即把新数据做迁移,而是当访问原来旧bucket的数据的时候,才把旧数据做迁移,如下图:
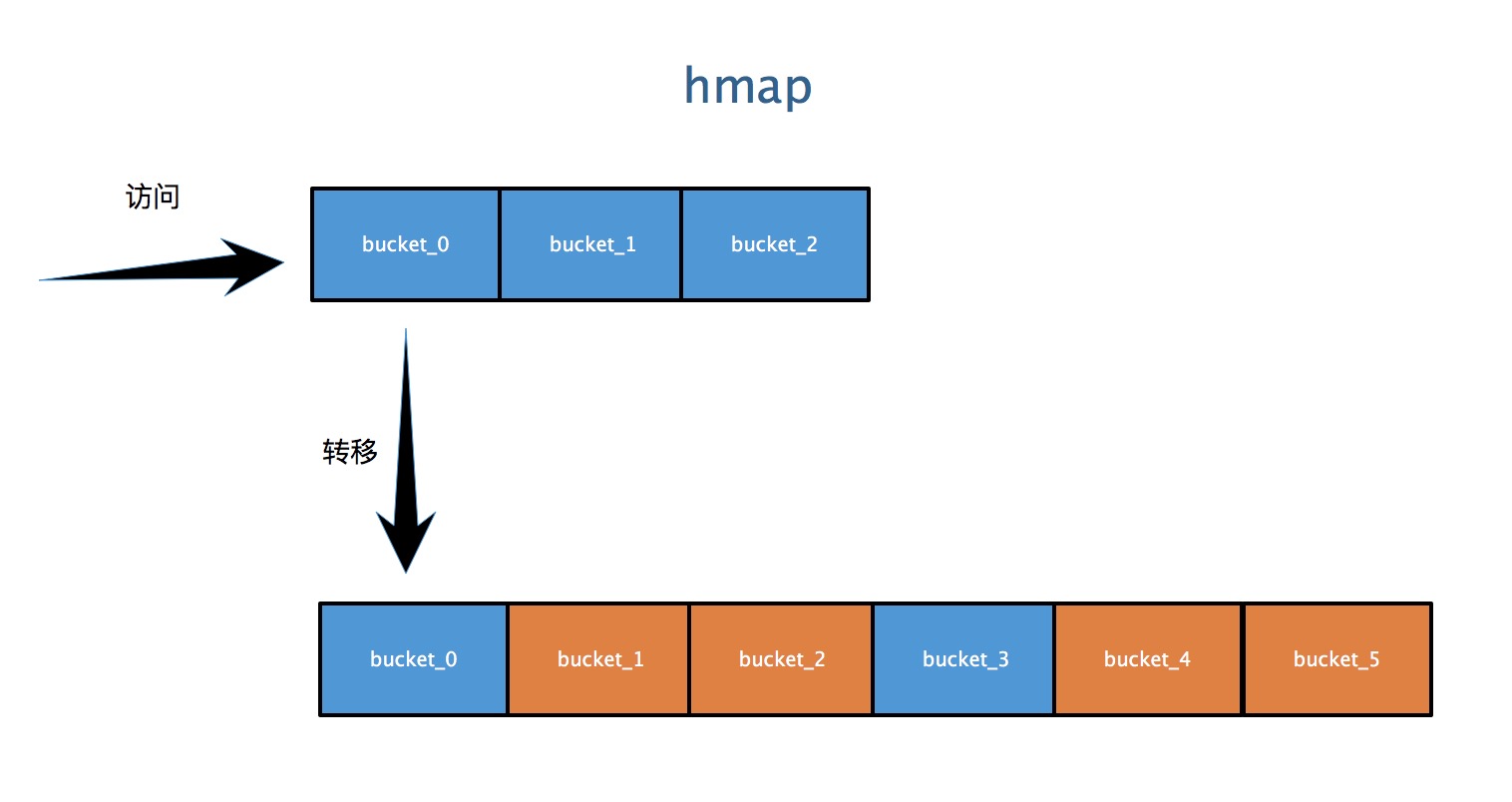
注意:这里并不会直接删除旧的bucket,而是把原来的引用去掉,利用GC清除内存。
map中数据的删除
如果理解了map的整体结构,那么查找、更新、删除的基本步骤应该都很清楚了。这里不再赘述。
值得注意的是,找到了map中的数据之后,针对key和value分别做如下操作:
1 | 1、如果``key``是一个指针类型的,则直接将其置为空,等待GC清除; |
本文标题:转载《解剖Go语言map底层实现》
文章作者:小师
发布时间:2019-06-19
最后更新:2022-05-04
原始链接:chunlife.top/2019/06/19/转载《解剖Go语言map底层实现》/
版权声明:本站所有文章均采用知识共享署名4.0国际许可协议进行许可