zookeeper中的一致性
前几天我看了Raft关于一致性读的操作,让我对于Raft - 扩展阅读这篇论文以及ETCD中读操作有了一些理解。
在实际的使用的这类服务中,写操作可能是比读操作少的,当我们需要优化读写性能时,就需要做一些功夫了。
和ETCD中很像的zookeeper,两者定位可以说都是非常相似的,在zk中,当zk节点越多,读性能相对越强,而在ETCD中,明显和这种情况不同,因为读写请求都需要leader进行响应,且还需要做一个Raft Log同步的操作,这也就会造成,节点多了,反而会导致性能下降。zk使用的zap协议,类似Raft一般,也是去维护日志,但却不影响zk的读取性能。为什么会造成这一现象呢?
ETCD是读操作是一致性读,不允许从不同节点读数据出现不一致的情况,所以即使是读数据的请求,也会被转发到leader节点来处理,这是已知的。zk则舍弃了这一点,允许client从节点读取数据,也就是说,允许出现数据与leader不一致的情况出现,但这个允许又是不太一样的。
一致性
zk的官方文档中,有对一致性保证的介绍:
来自于翻译。
zookeeper一致性的保证:
ZooKeeper是一种高性能,可扩展的服务,虽然读取速度比写入快,但是读取和写入操作都设计的极为快速,这样做的原因是在读取的情况下,ZooKeeper可能会提供较旧的数据,但这是为了ZooKeeper的一致性保证:
- 顺序一致性:来自客户端的更新将按照发送的顺序被写入到zk
- 原子性:更新操作要么成功要么失败,没有中间状态
- 单系统快照:客户端将看到服务的相同视图,而不管它连接到的服务器。
- 可靠性:一旦应用更新,数据将被持久化,直到数据被再次更新,对于该保证有两个推论:1、如果客户端得到了成功的返回码,说明写入成功,数据被持久化,如果出现了通信错误,超时等一些故障,客户端将不知道更新是否已应用。我们采取措施尽量减少失败,但唯一的保证是只有成功的返回码。 (这在Paxos中称为单调性条件。)2、如果客户端已经读取到了数据或者写入成功了数据,都不会因为zk的失败而导致回滚;
- 及时性:在一段时间后,客户端将看到最新的系统更新,在此期间客户端将看到这种变更。
有时开发人员错误地假定ZooKeeper实际上没有做出另一个保证:跨客户端的强一致性
ZooKeeper并不保证在每个实例中,两个不同的客户端将具有相同的ZooKeeper数据的视图。由于诸如网络延迟的因素,一个客户端可以在另一客户端被通知该改变之前执行更新,考虑两个客户端A和B的场景。如果客户端A将znode / a的值从0设置为1,则告诉客户端B读取/ a,则客户端B可以读取旧值0,这取决于它连接到的服务器。如果客户端A和客户端B读取相同的值很重要,则客户端B应该在执行读取之前从ZooKeeper API方法调用**sync()**方法。
因此,ZooKeeper本身不保证所有服务器上同步发生变化,但ZooKeeper原语可用于构建更高级的函数,提供有用的客户端同步。
zk的sync方法的解释:异步的实现当前进程与leader之间的指定path的数据同步;
解释
那zk一致性保证的是:
- 写请求是线性一致性的,读不是;
- 任何给定的client操作的执行顺序是由client来决定的,其称之为FIFO Client Order;
如果一个client表示,先执行这个写请求,然后再另一个写请求,接着再执行第三个写请求,在最终写请求的顺序中,我们会看到client的写请求的发生顺序是按照client所指定的顺序进行的。这是系统方面的一个问题,因为我们允许client发起写请求时,可以是异步的,在不等待任何写请求完成的情况下,一个client可以发送一堆写请求给ZooKeeper leader。
为了加强读性能,读请求可以由某些replica来处理,client所看到的就是replica上日志中的内容。
那读请求方面的FIFO client order的方式是:
对于连续的读请求,我们所观察到的日志点应该是一直向前走的。接连发起的两个读请求,第二个读请求看到的状态至少得是和第一个读请求(t1)看到的状态是一样新的。
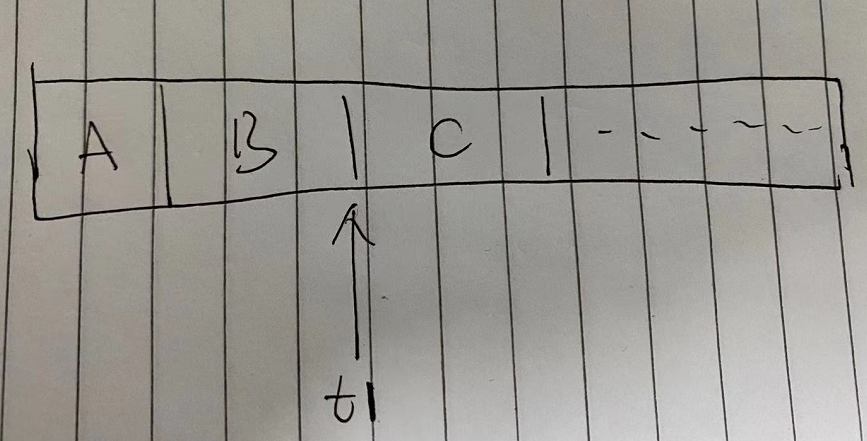
另外,当我读到t1时,replica宕机了,当client切换到新的replica时,其依然需要保证FIFO client order(读请求必须在这个t1时间点或者是这个时间点之后执行,尽管它切换到了不同的replica上)。
这里的工作方式是,这里的每个日志条目都被leader用zxid打上了标签,replica会将这个读过的日志条目的zxid发送给这个client,client会记住这是最新数据的zxid。
FIFO client order会应用于单个client的所有请求,如果执行了一个client端的写请求,将这个写请求发送给leader,leader还没有来得及对它进行处理或者提交,然后,再将一个读请求发送给了一个replica,为了保证FIFO client order,对于这个读请求的处理可能会延后处理,这个读请求可能得等到直到这个client看到并执行完前一个写请求才行,这就是FIFO client order所带来的影响——读的顺序和写的顺序一致。
比较简单理解就是,如果我将某个变量的值设为17,然后读取该变量的值,如果它的值并不是17,那么这就很奇怪了,那么这就表明,这系统完全没按照顺序来执行我的请求。当client发送一个读请求,client知道client发送给leader的上一个写请求所携带该数据的zxid之类的信息,这个replica必须等到它在leader中看到这个zxid才能执行该读请求。
以上就是,文档中所说的,zk没有保证跨客户端的强一致性。当然,我们也可以通过**sync()**函数,来保证我们读到最新值。其他时候,我们的读操作都不是一致性的。
理论
在理论计算机科学中,CAP定理(CAP theorem),又被称作布鲁尔定理(Brewer’s theorem),它指出对于一个分布式计算系统来说,不可能同时满足以下三点:
- 一致性(Consistence) (分布式环境中,一致性是指多个副本之间,在同一时刻能否有同样的值)
- 可用性(Availability)(系统提供的服务必须一直处于可用的状态。即使集群中一部分节点故障。)
- 分区容错性(Network partitioning)(以实际效果而言,分区相当于对通信的时限要求。系统如果不能在时限内达成数据一致性,就意味着发生了分区的情况,必须就当前操作在C和A之间做出选择。)
根据定理,分布式系统只能满足三项中的两项而不可能满足全部三项。理解CAP理论的最简单方式是想象两个节点分处分区两侧。允许至少一个节点更新状态会导致数据不一致,即丧失了C性质。如果为了保证数据一致性,将分区一侧的节点设置为不可用,那么又丧失了A性质。除非两个节点可以互相通信,才能既保证C又保证A,这又会导致丧失P性质。
根据以上的zk的表现,我们可以了解一些zk分布式设计的倾向性。CAP定理,这是一个归纳总结出来的理论,这三者不可能被一个系统同时满足,不同的server有不同的倾向性,对于分布式系统,P(分区容错)是必须要满足的,系统在C、A之间进行取舍,例如,ETCD就是满足CP,不满足A(ETCD不能时刻保持响应,例如选举时),同理,zk也是一个CP系统。
而在实际的应用中,我们其实一般不怎么参考CAP理论去设计应用架构,因为我们有着很多分布式的基础组件,我们的服务不是分布式的,但我们用上了分布式的组件时,就可以借助它们从而实现分布式的特性。
这里又要拉出一个理论了——BASE理论,它是三个词组的首字母缩写,即:
- 基本可用(basically available),允许损失部分可用性,保证整体可用性;
例如一个服务有问题,尝试失败后,进行熔断操作。
-
软状态(soft state),允许状态同步延迟(例如副本数据不一样),不会影响系统即可。
-
最终一致性(eventually consistent),经过一段时间后,系统能够达到一致性。
在实际的设计中,有这两个需要注意一下的:
- 架构进行简化,减少有状态的服务,尽量达到最终一致性。强一致性对服务来说设计比较复杂;
- 服务异常能被自我修复;(人工修复,软件重启,异常发现等等操作。。。)
本文标题:zookeeper中的一致性
文章作者:小师
发布时间:2021-04-25
最后更新:2022-05-04
原始链接:chunlife.top/2021/04/25/zookeeper中的一致性/
版权声明:本站所有文章均采用知识共享署名4.0国际许可协议进行许可